
Soft Agile Spaces
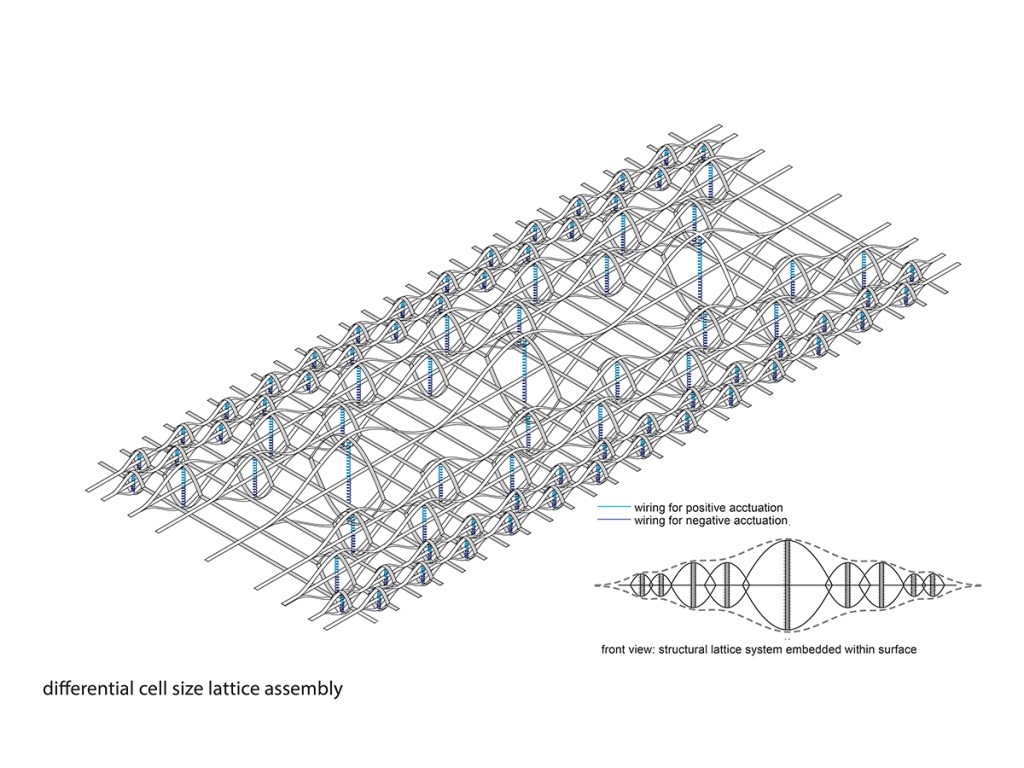
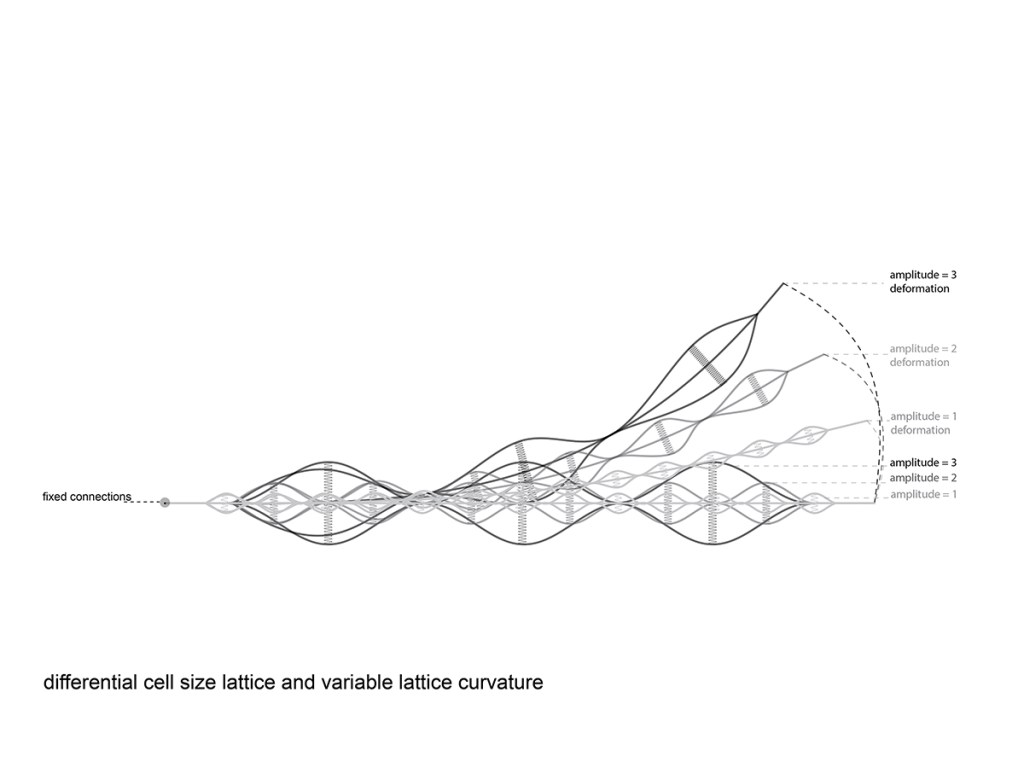
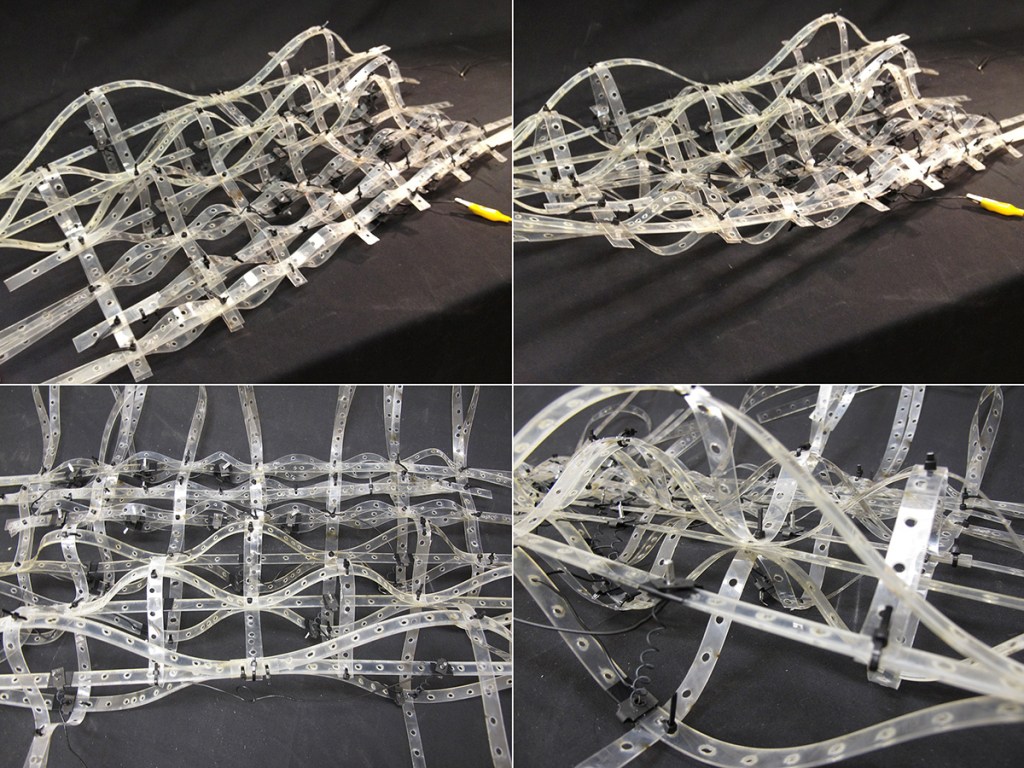
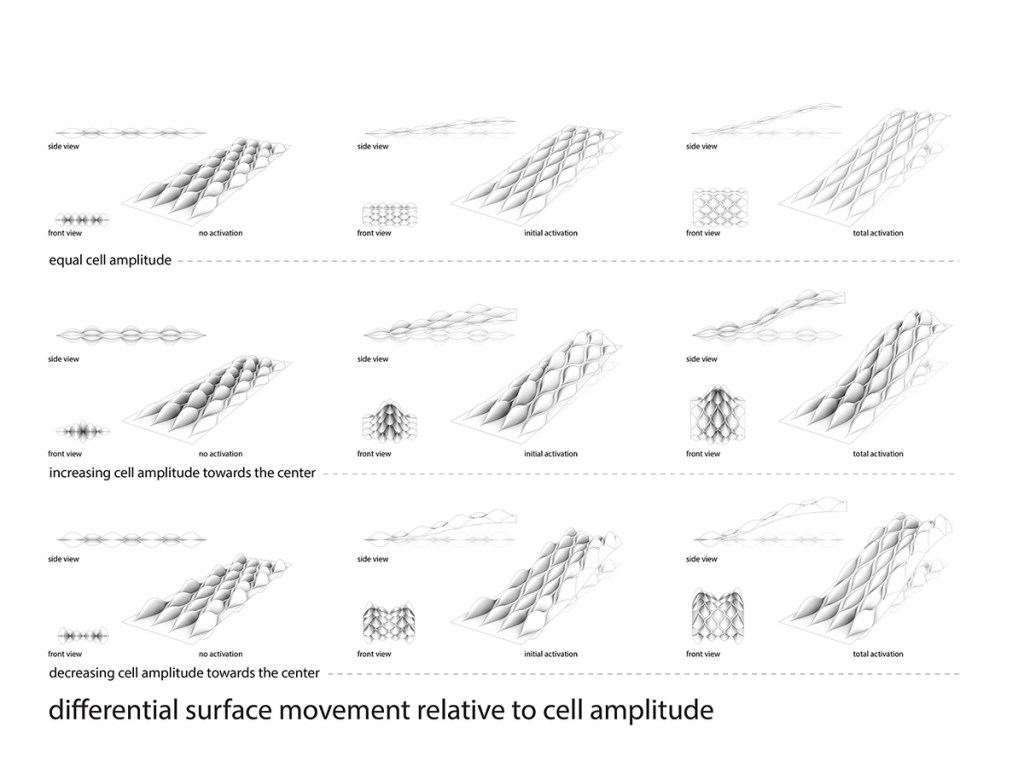
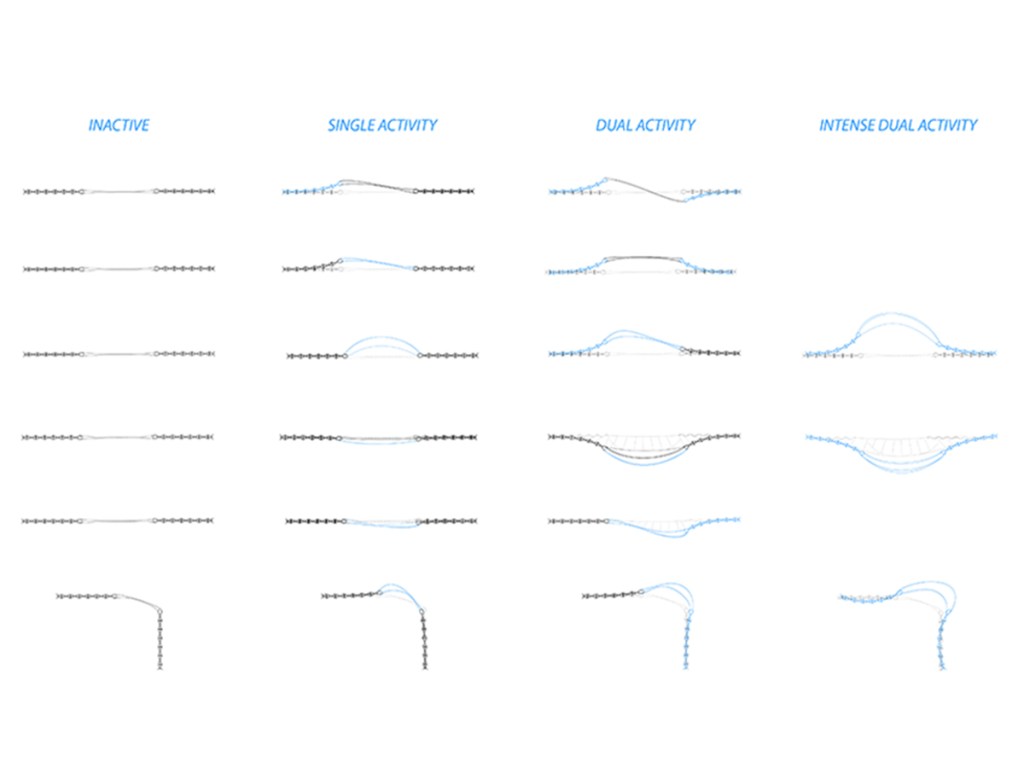
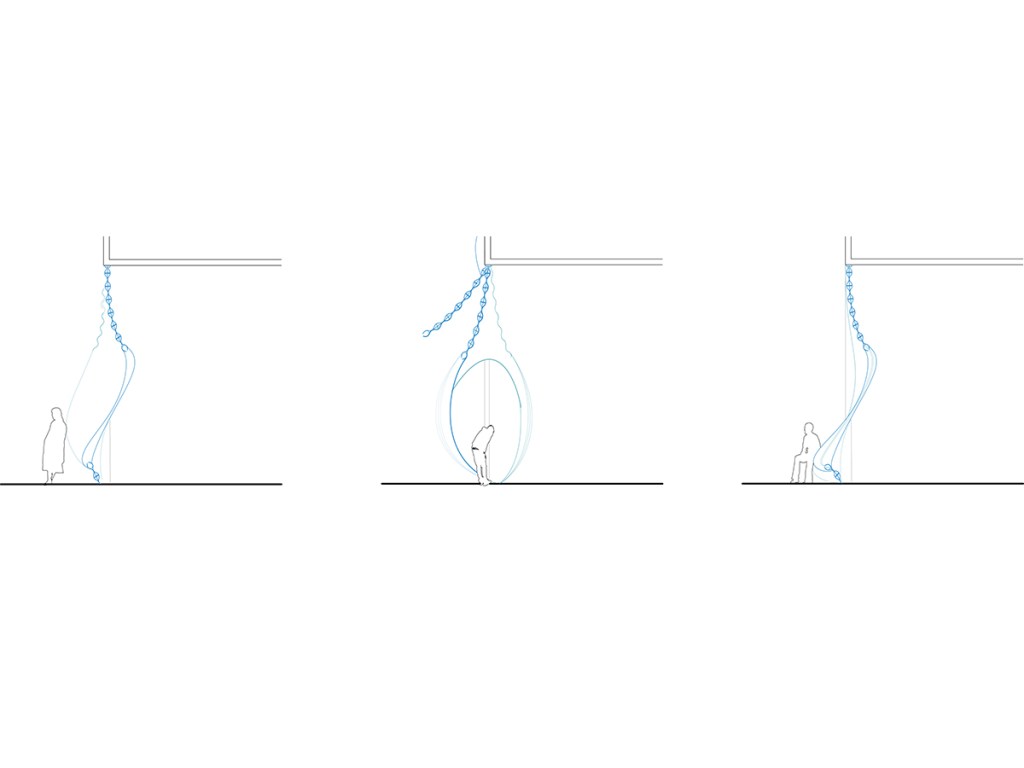
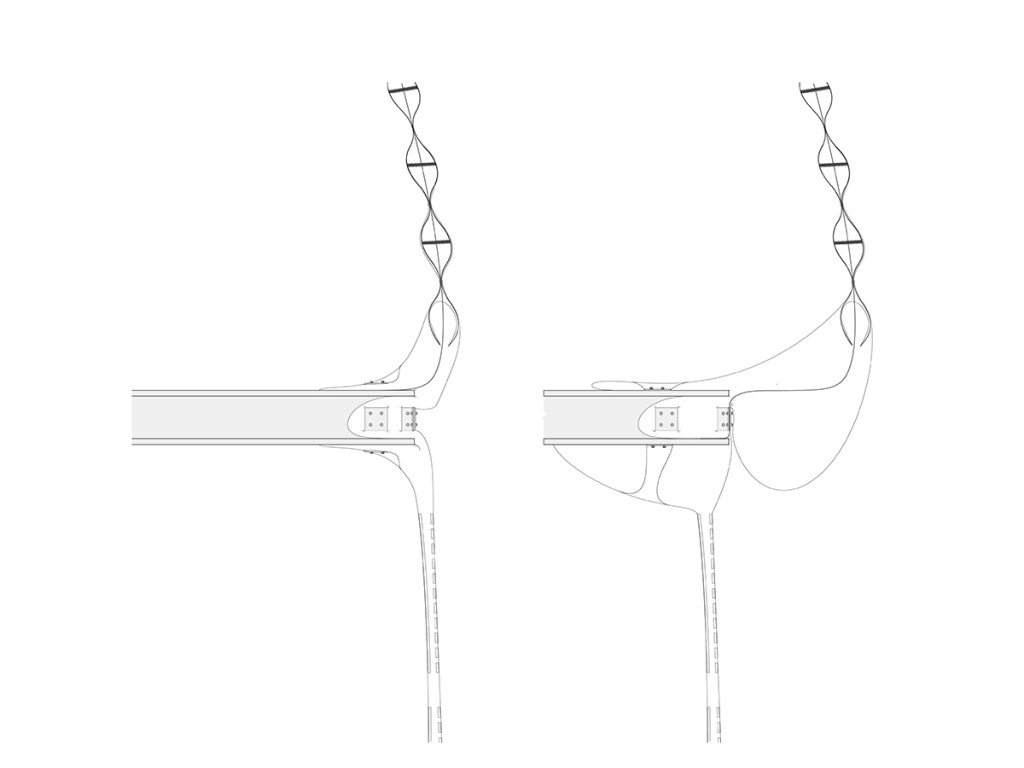
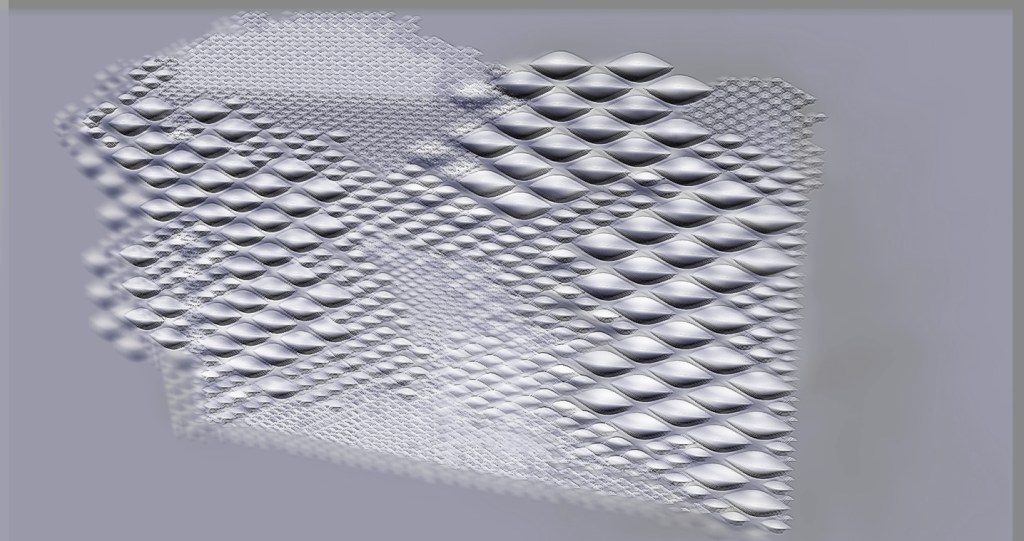
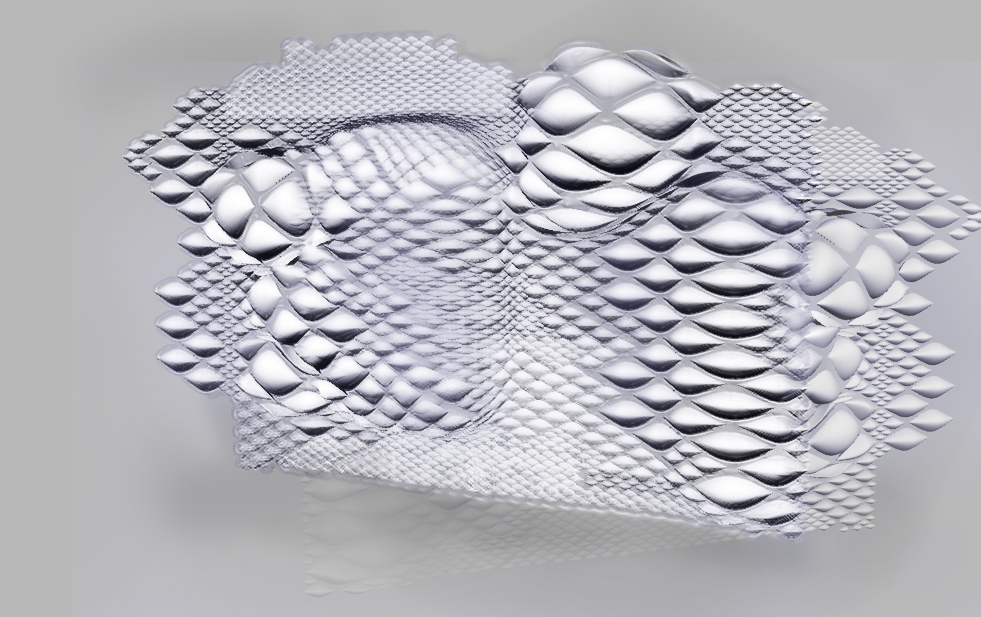
The Soft Agile Spaces project relies on non-mechanical material-based actuation using shape memory alloy springs (SMA) that are integrated into the structural lattice of the surfaces. The movement resulting from the material-based actuation of the lattice is augmented by an inflatable soft robot surface that extends the lattice system. The network of sensors distributed throughout the surface serves to enable information exchange between the surface, environment, and people. The Soft Agile Space project proposes an adaptable and responsive building envelope capable of sensing its environment and responding to it by changing its shape or revealing small occupiable spaces to passersby. These spaces can provide shelter or moderate the temperature of the environment, making public spaces in harsh, cold climates more vibrant. The “intelligence” of the surface’s physical environment is capable of incorporating climate and human-related conditions into its workings. By sensing the environmental temperature, the surface can mediate between the internal and external environments.
| Design Research | 2014| Supported by University of Calgary Seed Grant |
| PI and Design Principal: Vera Parlac |
| Research Assistants: Matt Parker, Andrea Patry, Kevin Spaans |
